
UB team designs brick-hauling robot for construction sites
By Rachel Teaman and Charlotte Hsu, courtesy of the University at Buffalo
A brickmason’s craft is to study plans, measure and cut bricks and stones, and then lay the materials with hairline precision to form stable, well-designed structures. But the highly skilled trade also involves hauling heavy materials, often while scaling ladders and scaffolding.
Now imagine the brickmason has an assistant — a four-legged robot — that can grab a stack of bricks, carry them across the construction site, climb a ladder and deliver the materials to the mason. The mason tells the robot exactly which materials are needed where through a pair of “smart glasses” that 3D-scan the site. The information is then transmitted offsite to the developer or architect monitoring the project.
This isn’t the stuff of science fiction, but the research of a team of architects and engineers at the University at Buffalo.
Michael Silver, assistant professor of architecture and self-taught roboticist, and Karthik Dantu and Nils Napp, both assistant professors of computer science and engineering, are in the early stages of a multi-year initiative to design, build and program a suite of tools that would not only improve the life of the mason but break new ground for architecture and robotics.
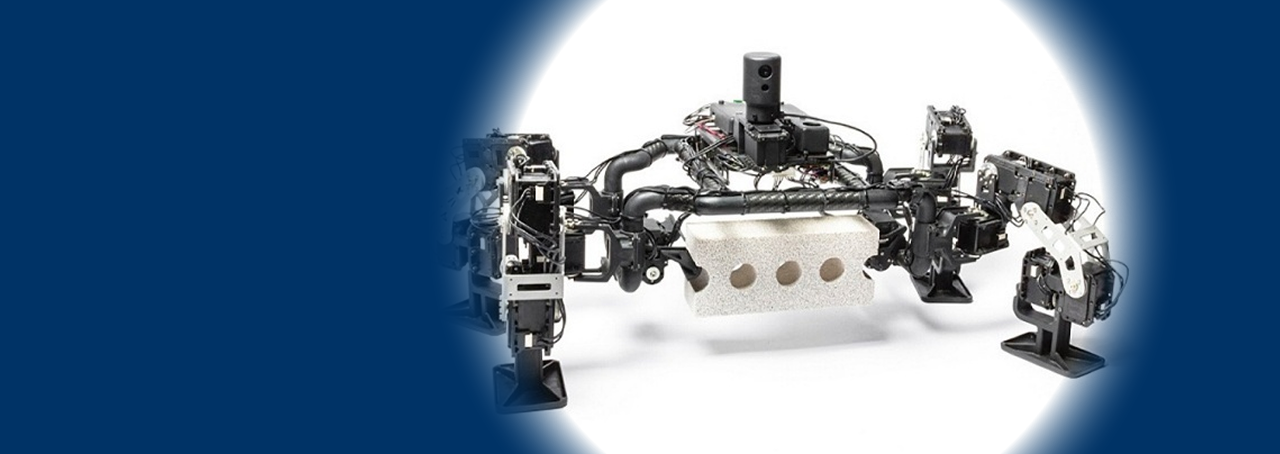
The team has prototyped a series of increasingly complex bots — all dubbed OSCR, short for On-Site Construction Robot. The latest, which stands 18 inches tall and weighs just under 6 pounds, is designed to climb a ladder and carry three bricks — skills the researchers hope to demonstrate once programming of the bot is complete. The final prototype, with advanced grippers and powerful motors, will be able to stack five bricks, walk or crawl, and scan the site to track materials.
Reflecting the direction of robotics in general, the team’s robots would not replace the mason but would enable smarter labor by taking on repetitive, backbreaking tasks and introducing logistical efficiency – for example, by deploying materials across the site faster and with fewer errors.
“The focus is shifting from robotics to co-robotics, where robots work with humans instead of replacing jobs,” Silver says. “Masons are a skilled class in high demand, but it’s getting harder to find people to support them by doing the difficult work of lugging heavy materials around a site. Our tools will actually advance the mason’s skills and create more time for craft by automating more tedious aspects of the job.”
Team members hope their bot-and-glasses combo will facilitate more advanced masonry, with masons leveraging the memory and computing power of the robot to increase the complexity with which bricks or stones are arranged.
Four-legged helpers prototyped
To assist masons successfully, the robots must be strong, lightweight and agile enough to navigate the difficult terrain of a typical construction site, says Silver, whose students spoke to masons before getting started to discuss the challenges of the job.
To build the initial prototypes, UB architecture students fashioned plastic parts on a 3-D printer. They tested different designs for the feet, frame and arm-like grippers that hold payloads in place. OSCR-3, the current prototype, features carbon fiber ribs which frame the robot, contain its wires and serve as handles.
UB programmers give each model its “brains,” teaching the machines to recognize their surroundings and perform complex movements, including maneuvering in extremely tight spaces. That part of the project is led by Dantu and Napp.
“The engineers have the technical expertise, and what we bring to it is the spirit of making,” Silver says. “Many of my students come from a construction background, and they’re very interested in how they can make this tool useful in industry.”
Robots on construction sites
Some of today’s most advanced automatons function within controlled environments or are programmed to do single tasks. OSCR’s realm is a construction site where people, materials and even the landscape are constantly in flux.
“We’re moving robots out of the factory and into the field – that’s a huge next step,” Silver says. “By bringing materials, machines and software together, we’re developing new processes for making, and that will change architecture.”
While the research effort is still in its early stages, it has already garnered support from the American Institute of Architects and the New York State Council on the Arts.
The researchers recently progressed to the second phase of the research: the development of “smart glasses” that wirelessly link the mason, robot and offsite Building Information Modeling systems – virtual simulations that architects, contractors and engineers use to map how a construction project is proceeding in space and time.
comments powered by Disqus